Amatrol’s eLearning curriculum is unique in that it thoughtfully combines in-depth theoretical knowledge with practical, hands-on skills. This powerful combination of knowledge and skills solidifies understanding and creates a strong foundation for pursuing more advanced skills.
For example, the precision gauging eLearning course covers important topics, such as:
Basic Robot Operation
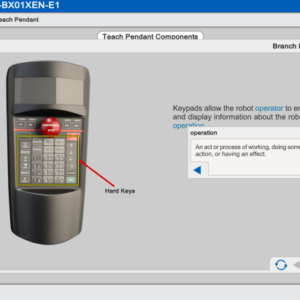
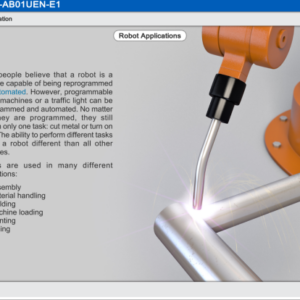
Learners begin with an introduction to robotic operation, including power up and shutdown, manual operation, homing, and end effector operation. Individual lessons focus on topics like five basic robot components, eight rules of robot safety, three types of job applications, function of the homing procedure, and two types of gripper finder designs. Learners will also practice skills, such as powering up and shutting down a Servo robot, jogging a Servo robot using a teach pendant, homing a Servo robot, and manually operating a robot gripper.
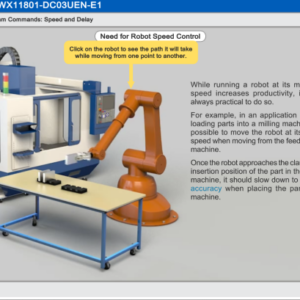
Basic Robot Programming
From there, learners will study the components and operation of basic robot programming, including teaching points, basic programming, and movement and end effector commands. Individual lessons focus on topics like how position points are recorded in a robot’s memory, four ways to stop a Servo robot, and operation of a move to point command. Learners will also practice skills, such as testing and editing teach points, running and stopping a Servo robot program, and designing a robot program to perform a basic material handling task.
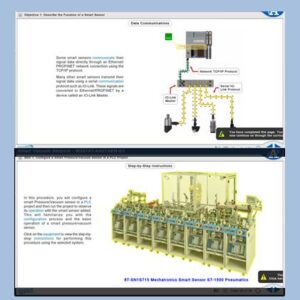
Interfacing and Material Handling
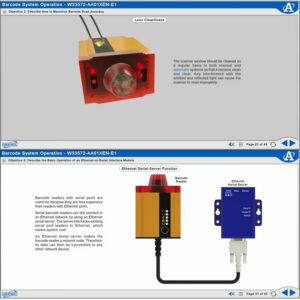
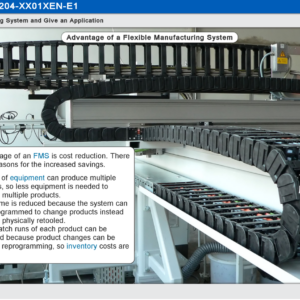
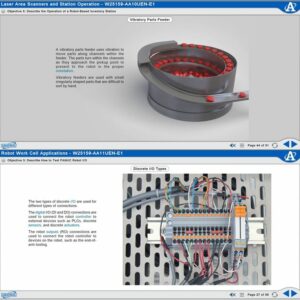
Finally, learners will advance to study interfacing and material handling, which includes modules on looping and speed commands, I/O interfacing, and material handling. Individual lessons focus on topics like operation of commands and program commands, function of a robot’s digital inputs and outputs, and how robots are applied to plastics injection molding. Learners will also practice skills, such as entering a robot program that uses speed and delay commands, manually testing discrete inputs and outputs, and designing a robot program that will unload an automatic machine.